
Articles récents
Linux/Unix : Les threads
A la diffÃĐrence des processus, le thread ne dispose pas d'un espace mÃĐmoire dÃĐdiÃĐ. Il doit mettre en place des mÃĐcanismes pour assurer les entrÃĐes/sorties au moment opportun. Nous ÃĐtudierons ces mÃĐcanismes de verrouillage de la mÃĐmoire.
Pourquoi ce partage de l'espace mÃĐmoire? C'est un constat, dans le monde des processus on rÃĐserve beaucoup de mÃĐmoire qui est souvent peu utilisÃĐe, alors qu'il s'agit d'une ressource rare et coÃŧteuse. Le thread dispose de l'ensemble de l'espace mÃĐmoire disponible, cela permet d'optimiser l'espace mÃĐmoire au plus juste. Mais cela implique que les diffÃĐrents threads doivent se gÃĐrer entre eux pour ÃĐviter les conflits d'ÃĐcriture.
En POSIX, une application peut Être composÃĐ de plusieurs processus, eux-mÊme composÃĐs de plusieurs thread. La norme POSIX rÃĐalise des threds qui sont portables d'une plateforme à une autre, on parle des POSIX thread ou des P-thread.
Pour compiler un code qui traite des thread, il y a une syntaxe particuliÃĻre:
1)Les activitÃĐs
On confond la dÃĐnomination activitÃĐ et thread, c'est la mÊme chose.1.1)Les attributs d'une activitÃĐ
Une activitÃĐ possÃĻde un identifiant TID (Thread Identity) de type pthread_t qui est un entier. Ce numÃĐro est complÃĐmentaire du PID pour identifier le processus.La fonction getpid() retourne l'identifiant du processus UNIX:
La fonction pthread_self() retourne l'identitÃĐ de l'activitÃĐ en cours (thread actif):
La fonction pthread_equal() permet de tester lÃĐgalitÃĐ entre deux identitÃĐs tid1 et tid2, valeur (nulle si oui):
1.2)crÃĐation/suppression d'une activitÃĐ
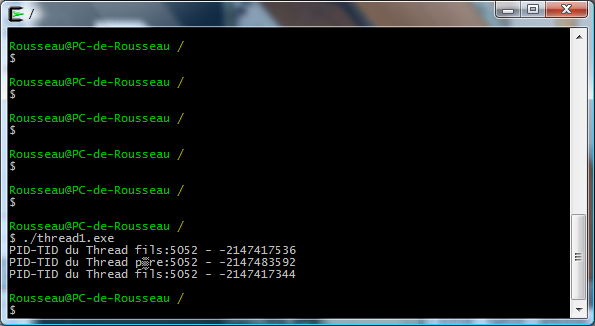
Pour crÃĐer un thread, il suffit de faire un appel à la fonction pthread_create(). Elle retourne 0 en cas de succÃĻs et -1 sinon (la variable errno permet de connaitre l'erreur rencontrÃĐe). Si l'appel est rÃĐussi, *thread reçoit l'identitÃĐ de l'activitÃĐ. start_routine correspond à la fonction qui sera exÃĐcutÃĐe par lâactivitÃĐ et arg correspond au paramÃĻtre de la fonction start_routine. A noter que le paramÃĻtre attr dÃĐfinit les attributs de l'activitÃĐ, avec la valeur NULL pour une utilisation par dÃĐfaut. Sinon, on peut utiliser la fonction pthread_attr_init() pour initialiser la paramÃĻtre attr.Voici un exemple de crÃĐation de thread:
Ce qui donne:
Pour arrÊter une activitÃĐ, nous avons exit() et _exit(). Si le processus est arrÊtÃĐ, toutes les activitÃĐs associÃĐes sont terminÃĐes. Pour arrÊter une activitÃĐ, il y aussi la fonction pthread_exit() qui termine l'activitÃĐ appelante.
Lorsqu'une activitÃĐ se termine, elle ne disparaÃŪt pas totalement et les ressources en mÃĐmoires ne sont pas libÃĐrÃĐes, il faut pour cela faire un appel à la fonction pthread_join(). Elle attend la fin du thread pour libÃĐrer les ressources, il faut donc l'appeler depuis le processus pÃĻre. Le paramÃĻtre th rÃĐfÃĐrence le thread à attendre et thread_return le code de retour ÃĐventuellement transmis par pthread_exit().
On ajoute à l'exemple prÃĐcÃĐdent la libÃĐration des ressources:
1.3)Demande de libÃĐration des ressources
Nous avons vu la fonction pthread_join() qui libÃĻre les ressources lorsque l'activitÃĐ se termine. Il existe d'autres fonctions comme pthread_detach() qui demande la libÃĐration des ressources au processus, auquel elle appartient, à la fin de vie de l'activitÃĐ.Il est impÃĐratif que les ressources soient libÃĐrÃĐes par un appel à la fonction pthread_join() ou pthread_detach().
La fonction pthread_cancel() demande l'abandon d'une autre activitÃĐ, l'activitÃĐ choisira si elle rÃĐalise l'abandon ou non avec les mÃĐthodes pthread_setcancelstate() ou pthread_setcanceltype().
2)Les mutex
Un mutex permet de verrouiller une zone critique pour assurer l'unicitÃĐ du travail d'une activitÃĐ. C'est un mÃĐcanisme trÃĐs puissant que nous allons ÃĐtudier ci-dessous.2.1)crÃĐation d'un mutex
Avant l'appel, le mutex pointe sur la zone rÃĐservÃĐe du futur mutex, mutteattr est l'ensemble des attributs à affecter au mutex, soit NULL par dÃĐfaut. AprÃĻs l'appel, le nouveau mutex pointe sur la zone dÃĐdiÃĐe. La fonction retourne 0 en cas de succÃĻs.
La primitive P pour un mutex:
L'appel bloquant pthread_mutex_lock() rÃĐserve un mutex ou attend que le mutex se libÃĻre pour le rÃĐserver au profit du thread appelant. La fonction retourne 0 en cas de succÃĻs.
Il existe un appel non bloquant (test et passe à la suite, pas d'attente contrairement à la fonction prÃĐcÃĐdente) qui est assurÃĐ par la fonction pthread_mutex_trylock(). 0 en cas de succÃĻs (errno=EBUSY si occupÃĐ et errno=EINVAL si le mutex n'est pas initialisÃĐ
La primitive V pour un mutex:
La fonction pthread_mutex_unlock() permet de dÃĐbloquer une activitÃĐ en attente sur ce mutex. Elle retourne 0 en cas de succÃĻs.
2.2)Destruction d'un mutex
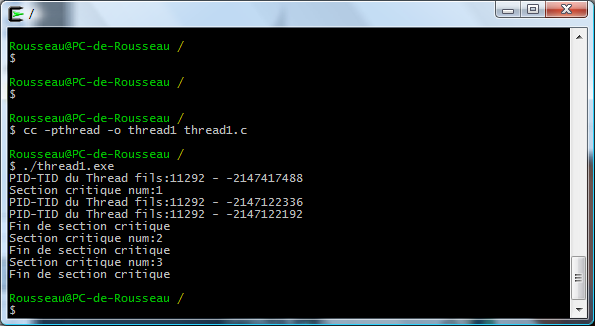
Pour dÃĐtruire un mutex, il y a la fonction pthread_mutex_destroy().2.3)Exemple d'utilisation
Voici un exemple d'utilisation de l'utilisation d'un mutex. On crÃĐÃĐ trois fonctions qui attendent la fin de la prÃĐcÃĐdente pour se lancer.Ce qui donne:
3)Les conditions autour du mutex
La condition des mutex permet de synchroniser plusieurs activitÃĐs dans une section critique. Le mÃĐcanisme gÃĐnÃĐrale :3.1)Initialisation d'une condition
Il faut prÃĐparer la condition en appelant la fonction pthread_cond_init(), cond est un pointeur sur l'espace mÃĐmoire rÃĐservÃĐ Ã la condition et cond_attr prÃĐcise les attributs de la condition. AprÃĻs l'appel, cond pointera sur la nouvelle condition. La fonction retourne 0 en cas de succÃĻs.3.2)Attente sur une condition
La fonction pthread_cond_wait a un fonctionnement assez particulier:Le problÃĻme de la fonction prÃĐcÃĐdente est que l'attente n'est pas bornÃĐe, elle peut Être infinie! Aussi, il existe une fonction qui attend un temps limitÃĐ. On lui passe un objet abstime pour dÃĐfinir le temps à patienter.
3.3)Envoi d'un signal
Cela permet d'activer un thread en attente sur une condition.Il est ÃĐgalement possible d'envoyer un signal à toutes les activitÃĐs:
3.4)Suppression d'une condition
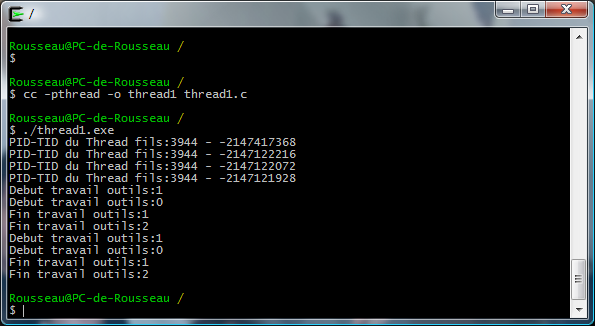
3.5)Exemple
Voici un exemple de code ou quatre thread doivent se partager 2 outils pour travailler, et donc il y a des threads en attente.Ce qui donne:
4) Autres fonctions relatives
4.1) Demande explicite de libÃĐration
Le systÃĻme Unix ou Linux dispose d'un ordonnanceur, qui permet de gÃĐrer les activitÃĐs multi-threading. Il s'agit d'un mÃĐcanisme autonome, mais fort heureusement il existe un fonction pour agir dessus. Cela se fait par la fonction sched_yield(), ainsi en l'utilisant, un thread peut demander de rendre la main (fonctionne ÃĐgalement avec les processus).4.2) Appel unique à une fonction
Il existe un mÃĐcanisme qui permet de lancer une fonction une seule fois, utile notamment dans un milieu multi-thread pour initialiser les variables. Il est nÃĐcessaire pour ce faire d'initialiser une variable pthread_once_t avec PTHREAD_ONCE_INIT puis on utilise la fonction pthread_once(). Voici un exemple:5)Gestion des thread sous Linux
Linux ne distingue pas les processus et les thread au niveau du noyau, c'est juste le contexte dâexÃĐcution qui fait que la mÃĐmoire est partagÃĐe ou pas. En fait le fork() ou le pthread_create() font appel au mÊme appel systÃĻme clone(). Mais pour respecter la norme POSIX, le noyau Linux a introduit les particularitÃĐs suivantes:Conclusion
Voila vous avez les bases pour commencer à coder des scripts en multi-threading! Attention de bien sÃĐcuriser vos variables globales.
© 2025 www.doritique.fr par Robert DORIGNY