
Articles récents
Domotique : DÃĐtecteur d'ouverture de porte par ultrason
Nous avons vu prÃĐcedement comment mesurer une distance avec un capteur à ultrason. Je vous propose dans cet article une autre application du HY-SRF05, il s'agit de dÃĐtecter l'ouverture d'une porte sectionnelle de garage.
Nous allons voir comment mettre en oeuvre un sonar communiquant qui nous avertira en cas d'ouverture/fermeture de la porte par SMS. Pour cela, nous utiliserons un Raspberry pi Zero WH et un peu de code Python.
Je ne reviens pas dans cet article sur le principe de fonctionnement du capteur à ultrason et sur le schÃĐma du montage avec le RasBerry Pi. Vous trouverez tous les dÃĐtails ici.
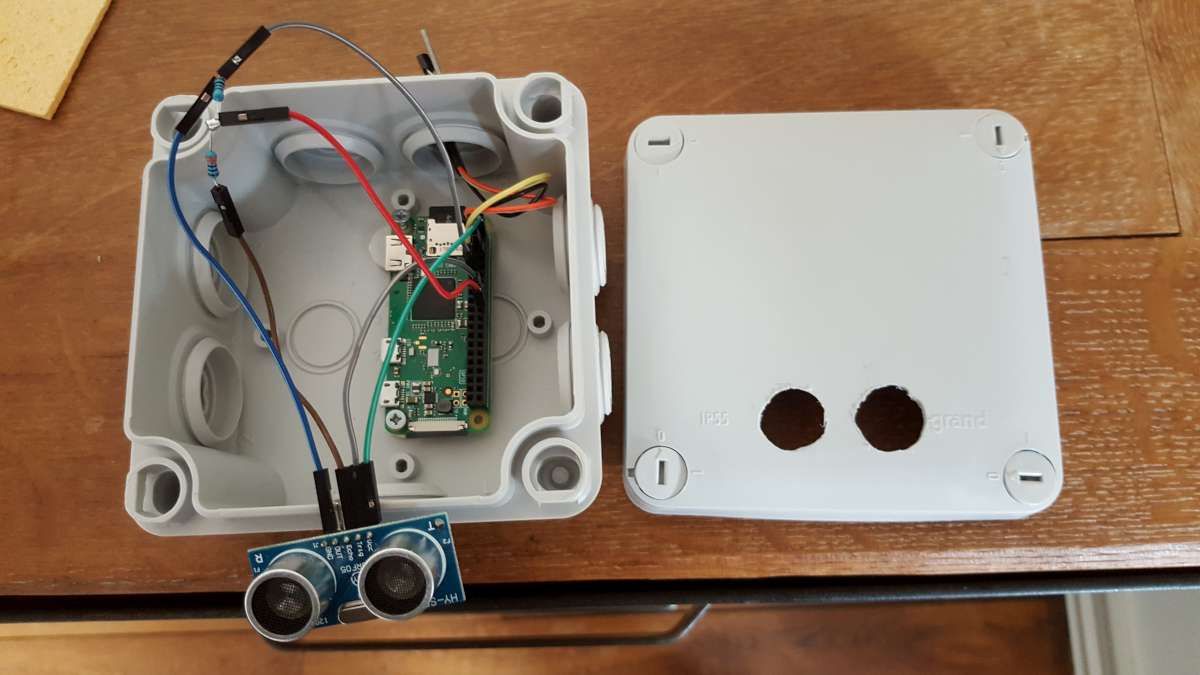
1) Mise en oeuvre du boitier
Pour commencer, il faut disposer d'un boitier le plus adaptÃĐ Ã notre engin afin de le protÃĐger. L'idÃĐal serait de disposer d'une imprimante 3D pour fabriquer un boitier adaptÃĐ, malheureusement ce n'est pas mon cas. AprÃĻs un moment de rÃĐflexion, j'ai optÃĐ pour une boite de dÃĐrivation de taille classique (105 mn). Avantages, on en trouve partout, les trous pour passer les cÃĒbles sont dÃĐjà existants, et l'ouverture faciale est facile.Avant de commencer, je conseille de rÃĐaliser une maquette avec un carton, un peu de scotch et une plaque de montage breadboard. Il suffira alors de faire deux trous dans le carton pour l'ÃĐmetteur et le rÃĐcepteur. Cela permet nous de savoir oÃđ positionner le futur boitier et surtout de son orientation. Point important, l'angle doit Être le plus perpendiculaire possible. Autre point, qui parait ÃĐvident, une surface plane de rÃĐception pour obtenir des donnÃĐes de distance cohÃĐrentes.



Une fois que l'on obtient des mesures cohÃĐrentes, on passe à la prÃĐparation du boitier. Faite un marquage au crayon gras, pour ensuite percer (foret mÃĐtal de 5mn) le plastique.




On peut assez facilement fixer le Raspberry pi avec de petites vis dans la boite. Pour le pont diviseur, j'ai rÃĐalisÃĐ une soudure à l'arrache, je vous conseille plutÃīt d'utiliser des plaques de prototypes pour circuit ÃĐlectronique. On en trouve de toutes les tailles sur Amazon. J'en ai profitÃĐ pour ajouter une sonde thermique ds18b20 (vous trouverez un article ici sur le sujet) et le faire sortir le capteur de la boite.

Voila ce que çà donne une fois sur place dans le garage:



2)Le script
ForcÃĐment,j'ai quelque peu modifiÃĐ le script Python. Comme souvent dans mes scripts, je fais un daemon fonctionner en arriÃĻre plan plutÃīt que via un module Linux. Ensuite, toutes les 10 secondes, je lance un processus qui rÃĐalise 3 mesures, fais la moyenne des trois, et envoie un SMS s'il dÃĐtecte un changement d'ÃĐtat sur l'ouverture/fermeture de la porte.#*****************************************************************************************************
#
# Robert DORIGNY - www.doritique.fr le 2 avril 2018
#
# Ce script pour construire un sonar de detection de porte avec un HY-SRF05
#
#*****************************************************************************************************
from __future__ import print_function
import os
import sys
import time
import datetime
import urllib2
import urllib
import threading
import RPi.GPIO as GPIO
GPIO_TRIGGER = 23
GPIO_ECHO = 24
speedSound = 33112
position = 0 # Conserve en memoire la position de la porte, 0 pour fermee et 1 pour ouverte
Mem = [0,0,0] #Conserve en memoire les dernieres mesures
Longueur_Seuil=300
TabSMS = [["votreid", "votrecle"]] #telephones cible des SMS
#Fonction chargee de la transmission des donnees
def sendval():
#Emission SMS
date = datetime.datetime.now()
txt=str(date)
if (position==0):
txt="Garage : Porte fermee : "+txt
else:
txt="Garage : Porte ouverte : "+txt
for i in TabSMS:
data={}
data['user']=i[0]
data['pass']=i[1]
data['msg']=txt
url_values=urllib.urlencode(data)
data=urllib2.urlopen("https://smsapi.free-mobile.fr/sendmsg"+"?"+url_values)
#print("Transmission SMS OK")
#Trace dans BDD
data={}
data['action']='set'
data['var']='loggarage'
data['data']=str(position)
url_values=urllib.urlencode(data)
data=urllib2.urlopen("http://www.votresite.fr/Myapi.php"+"?"+url_values)
#Cette fonction mesure la distance
def measure():
#On lance un front pour lancer la mesure
GPIO.output(GPIO_TRIGGER, True)
# Attend 10us
time.sleep(0.00001)
GPIO.output(GPIO_TRIGGER, False)
start = time.time() #heure de debut
while GPIO.input(GPIO_ECHO)==0:
start = time.time()
while GPIO.input(GPIO_ECHO)==1:
stop = time.time()
elapsed = stop-start
distance = (elapsed * speedSound)/2
return distance
#Cette fonction effectue 3 mesures et retoune la valeur moyenne
def measure_average():
distance1=measure()
time.sleep(0.1)
distance2=measure()
time.sleep(0.1)
distance3=measure()
distance = distance1 + distance2 + distance3
distance = distance / 3
return distance
class myThread (threading.Thread):
def __init__(self,name):
threading.Thread.__init__(self)
self.name=name
def run(self):
#Recuperation des donnees
distance=measure_average()
#print("Distance : {0:5.1f}".format(distance))
#Gestion du changement de position de la porte
Mem[2]=Mem[1]
Mem[1]=Mem[0]
Mem[0]=int(distance)
#print("Mem:"+str(Mem[0])+","+str(Mem[1])+","+str(Mem[2]))
global position
if ((position==0) and (Mem[0]>Longueur_Seuil) and (Mem[1]>Longueur_Seuil) and (Mem[2]>Longueur_Seuil)):
position=1
#print("Porte ouverte")
sendval()
if ((position==1) and (Mem [ 0 ] < Longueur_Seuil) and (Mem[ 1 ] < Longueur_Seuil)
and (Mem[ 2 ] < Longueur_Seuil)):
position=0
#print("Porte fermee")
sendval()
sys.exit()
#*******************************************Fonction principale************************************
def main():
#Mise en daemon
fpid = os.fork()
if fpid!=0:
# Fonctionne en daemon desormais. Le PID est fpid
sys.exit(0)
# Utilise le mode BCM des GPIO references
GPIO.setmode(GPIO.BCM)
# Setup des pins output et input
GPIO.setup(GPIO_TRIGGER,GPIO.OUT) # Trigger
GPIO.setup(GPIO_ECHO,GPIO.IN) # Echo
# Setup trigger pour False (niveau Low)
GPIO.output(GPIO_TRIGGER, False)
# Laisse du temps pour la prise en compte du setup
time.sleep(0.5)
try :
while True:
thread1 = myThread("HYSRF05")
thread1.start()
thread1.join()
time.sleep(10)
except KeyboardInterrupt:
# User pressed CTRL-C
# Reset GPIO settings
GPIO.cleanup()
if __name__ == "__main__":
main()
Pour la transmission du SMS, je vous renvoie sur l'article ici que j'avais rÃĐalisÃĐ sur l'utilisation de l'API de l'opÃĐrateur Free (si tu as free, tu as tout compris!). Cette option est offerte gratuitement pour ceux qui ont un forfait mobile chez cet opÃĐrateur. Il est à noter que les ouvertures/fermetures peuvent Être journalisÃĐes si vous disposez d'un base de donnÃĐes dans le "cloud".
Conclusion
Voici donc un exemple de mise en oeuvre de la sonde HYSRF05. Elle fonctionne parfaitement depuis 15 jours dans mon garage. Pas de soucis particulier, juste à bien respecter les deux rÃĻgles qui sont : il faut une surface plane pour faire un ÃĐcho propre; il faut respecter le parallÃĐlisme pour que les mesures soient juste. Je compte ajouter une camÃĐra en façade quand j'aurais peu plus de temps. On en recause! :-)
© 2025 www.doritique.fr par Robert DORIGNY